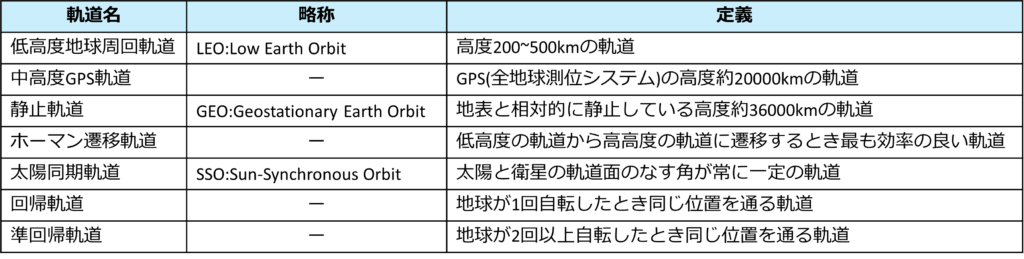
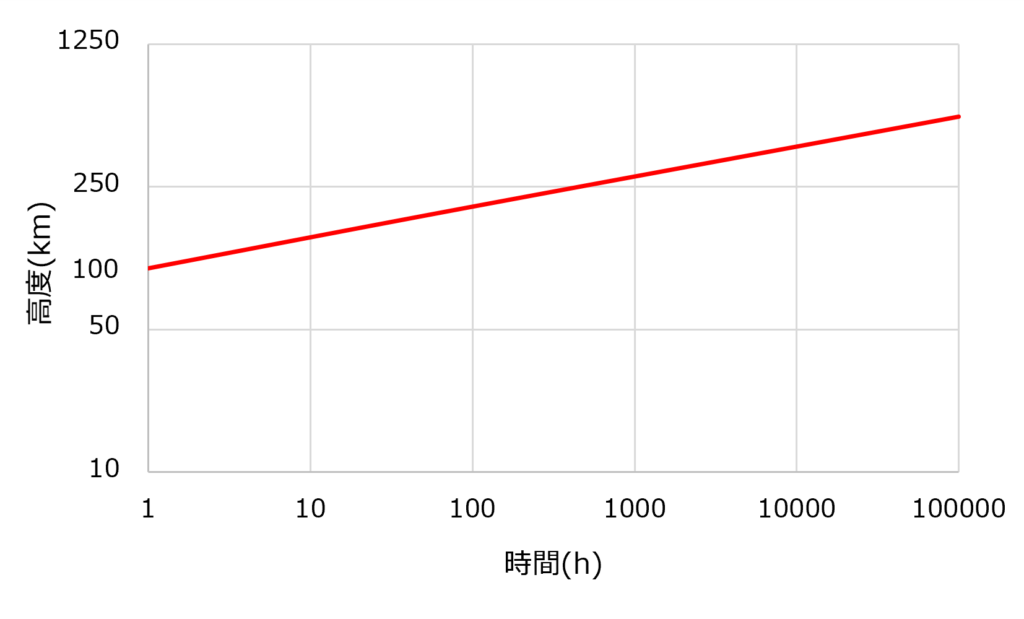
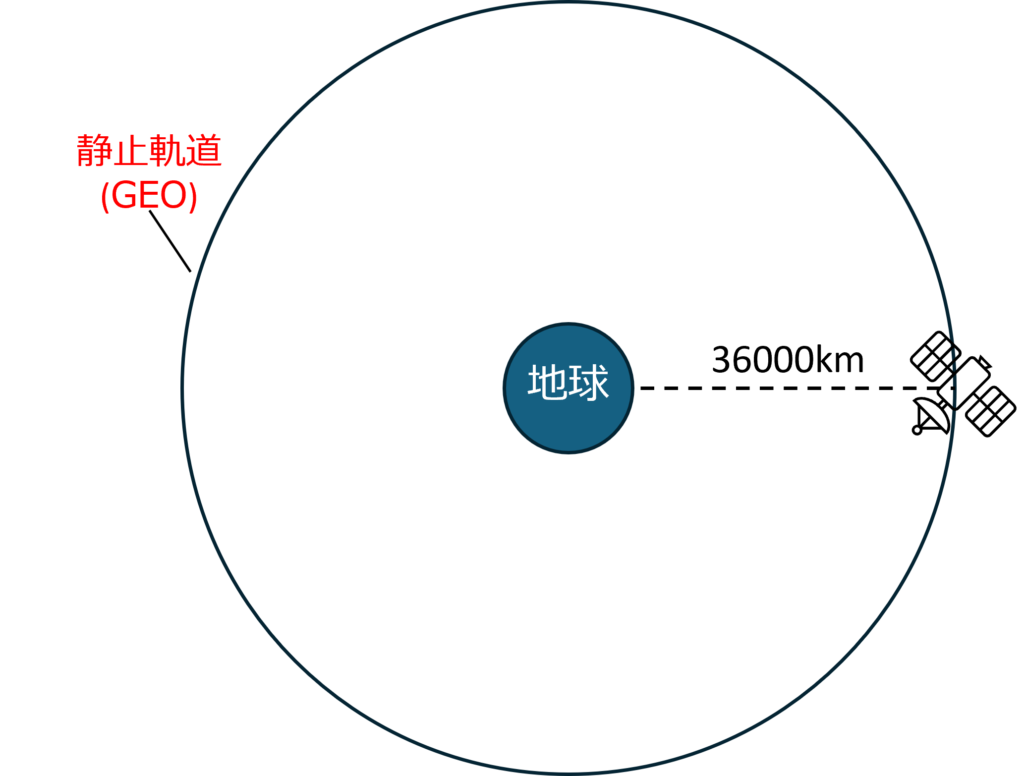
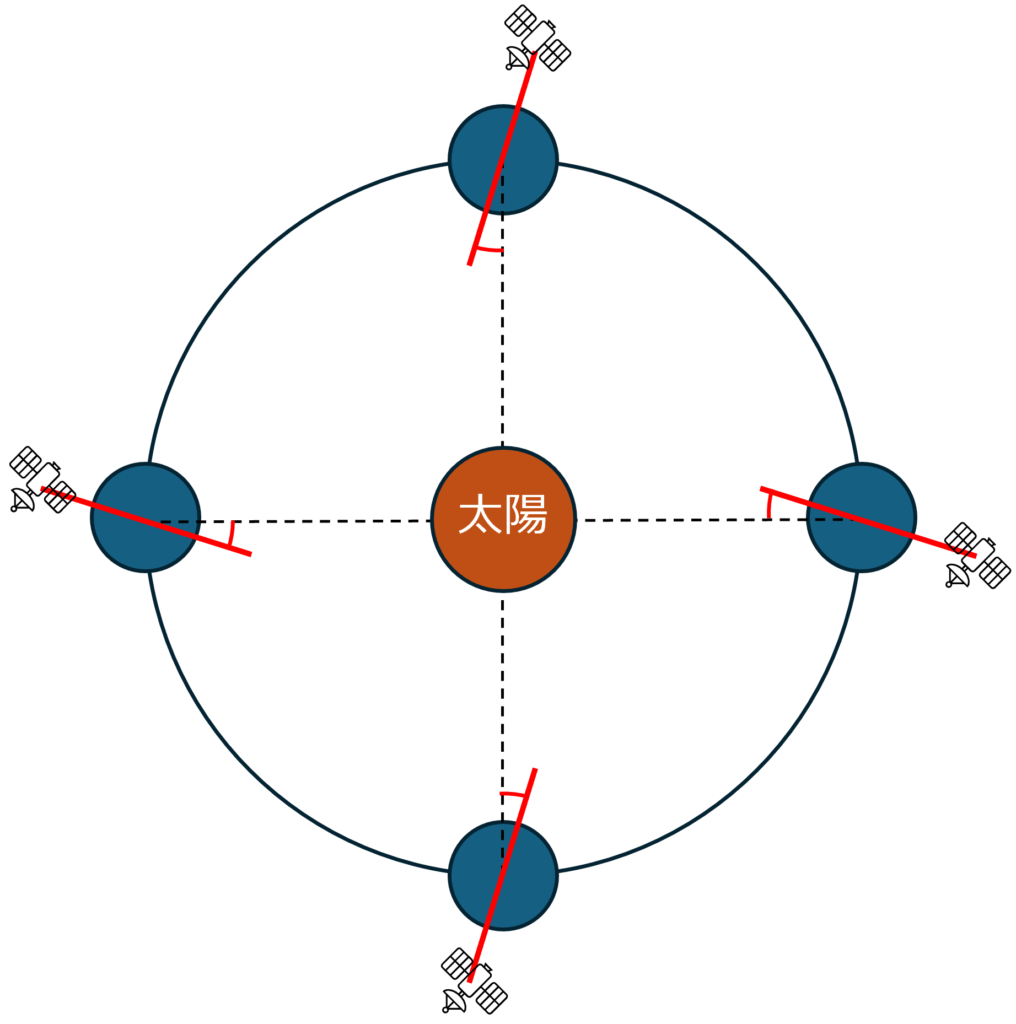
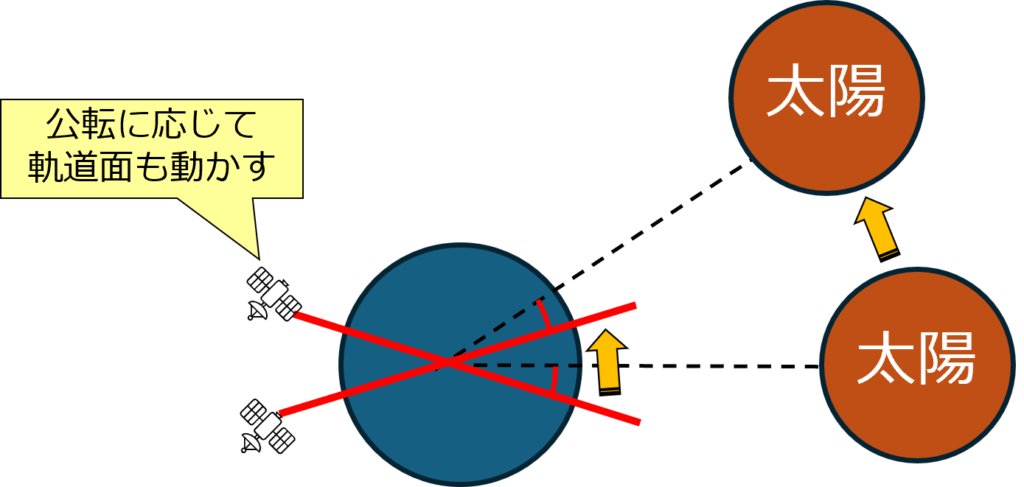
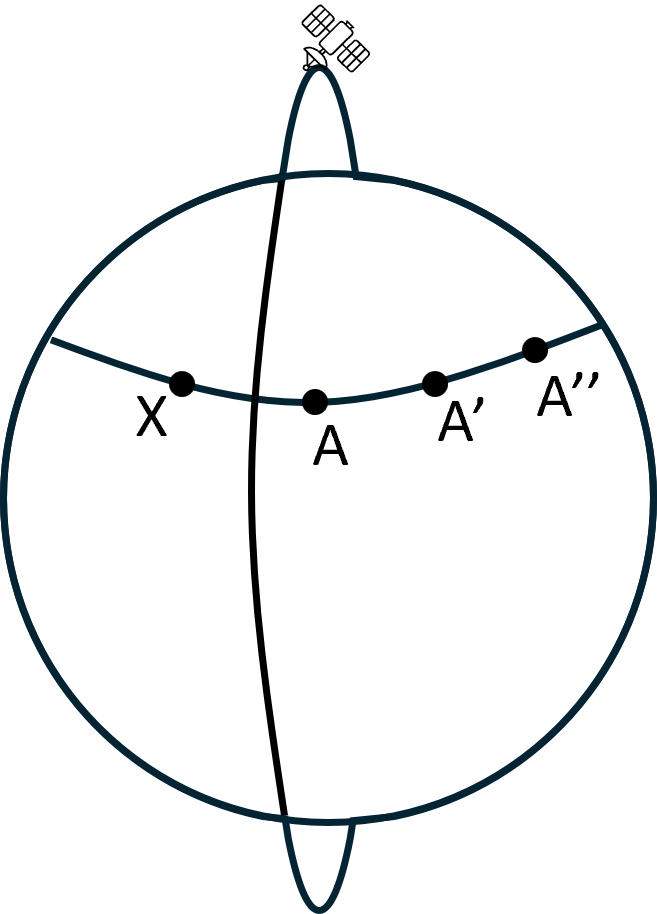
人工衛星の軌道 ロケット工学 X LINE コピー 2024.11.052024.11.17 地球の周りには2024年時点で約9000基の人工衛星が存在しています。人工衛星はどのような軌道で地球の周りを回っているのか解説します。 目次 Point人工衛星および探査機の軌道一覧低高度地球周回軌道(LEO:Low Earth Orbit)静止軌道(GEO:Geostationary Earth Orbit)静止トランスファ軌道(GTO:Geostationary Transfer Orbit)太陽同期軌道(SSO:Sun-Synchronous Orbit)回帰軌道・準回帰軌道準回帰軌道と太陽同期軌道の組み合わせ参考文献 Point人工衛星の主要な軌道は以下の通り。低高度地球周回軌道(LEO:Low Earth Orbit)静止軌道(GEO:Geostationary Earth Orbit)静止トランスファ軌道(GTO:Geostationary Transfer Orbit)太陽同期軌道(SSO:Sun-Synchronous Orbit)回帰軌道準回帰軌道 人工衛星および探査機の軌道一覧 図1 人工衛星および探査機の軌道 人工衛星および探査機の軌道の一覧を図1に示します。図1の軌道は全て,円または楕円の形状をした軌道です。本記事では図1の軌道の中からピックアップした主要な軌道を解説します。 低高度地球周回軌道(LEO:Low Earth Orbit)低高度地球周回軌道(LEO)とは,高度200~500kmの円・楕円軌道です。国際宇宙ステーション(ISS:International Space Station)は高度約400kmを周回しているため,こちらもLEOとなります。LEOは空気が希薄ながら存在するため,人工衛星に空気抵抗などの空気力が発生します。空気抵抗による減速により,軌道修正を行わない限り高度を維持することができません。図2はLEOの人工衛星の軌道高度における滞空可能時間を表しています。 図2 地球周回円軌道の滞空時間 図2より,高度100kmのときはわずか1hしか滞空することができません。LEOはパーキング軌道と呼ばれる,より必要なエネルギーが高い高高度の軌道に遷移するための待機軌道として利用されます。 静止軌道(GEO:Geostationary Earth Orbit)静止軌道(GEO)とは,静止衛星と呼ばれる地表から見たときに静止してるように見えるような人工衛星の軌道です。赤道上空を必ず周回しています。赤道上を周回しない場合,地表から見たときに静止するようにはなりません。GEOは周期が地球の自転と同じ24時間で,高度は約36000kmです。そこで,GEOの高度が約36000kmであることを導出します。人工衛星を中心とした非慣性系で考えると,遠心力と万有引力のつり合いの式は以下のようになります。$$m\frac{v^2}{r}=G\frac{Mm}{r^2}\tag{1}$$\(m\)は人工衛星の質量,\(r\)は地球中心と人工衛星との距離,\(v\)は人工衛星の速度,\(G\)は万有引力定数(=6.6726×10⁻¹¹),\(M\)は地球質量(=5.9742×10²⁴)を表します。また,円運動の公式より周期Tは$$T=\frac{2πr}{v}\tag{2}$$(1)と(2)より\(v\)を消去して\(r\)について整理すると$$r=\sqrt[3]{\frac{GMT}{4π^2}}\tag{3}$$周期\(T\)はGEOであるため,地球の自転と等しいです。うるう年などを考慮すると\(T\)は86164秒となります。よって,\(r\)は$$r=\sqrt[3]{\frac{6.6726×10^{-11}×5.9742×10^{24}×86164}{4π^2}}=42164km\tag{4}$$最後に地球の半径\(R\)は6378kmなので,式(4)の42164kmをGEOの高度は35786kmとなります。気象・放送・通信用衛星などの大半がGEOを周回しています。GEOは人類にとって貴重な有限資源であるため,国際電気通信連合・無線通信部門(ITU-R)によって各国が使用できる経度の位置が管理されています。 図3 静止軌道 静止トランスファ軌道(GTO:Geostationary Transfer Orbit) 静止トランスファ軌道(GTO)とはホーマン遷移軌道の1つです。ホーマン遷移軌道とは低高度から高高度の軌道に最も効率良く遷移する軌道のことです。GTOは低高度地球周回軌道(LEO)から静止軌道(GEO)に遷移するための軌道です。LEOからGEOの遷移する手順としては,LEOで人工衛星を増速させGTOに遷移させます。その後GTOで再び増速させることで,GEOに遷移させます。LEO→GTOで増速させることをペリジキック,GTO→GEOで増速させることをアポジキックと呼びます。例えば,H-ⅡAロケットではペリジキックは2段目のロケットエンジンが,アポジキックは人工衛星自身が行います。 図4 LEOからGEOの遷移 太陽同期軌道(SSO:Sun-Synchronous Orbit)太陽同期軌道(SSO)とは人工衛星の軌道面と太陽のなす角が常に一定となる軌道のことです。SSOは北極と南極を必ず通る極軌道にきわめて近い軌道です。 図5 太陽同期軌道 地球は1年で1周公転しており,1日にして約0.986°(=360°/365日)公転しています。軌道面を変えずに1日経過すると,太陽と軌道面のなす角は0.986°ズレます。ということは,軌道面も地球の公転に合わせて角度をズラせば,太陽と軌道面のなす角は常に一定となると考えることができます。ではどうやって軌道面の角度を地球を公転に合わせてズラすのでしょうか?そこで,地球が完全な球体ではないことを利用します。地球は赤道半径のほうが極半径よりも21kmほど長く,完全な球体を少し上下に潰したしたような形となっています。このような形状により,地球の引力には理想から外れた成分が生じます。よって,人工衛星は完全な楕円軌道ではなくなり軌道面が変化します。このように惑星の形状が完全な球体ではないことや空気抵抗などの要因によって人工衛星の軌道に変化が生じることを摂動と呼びます。SSOは摂動を利用し,軌道面を地球の公転によるズレと合わせるように変化させることで,人工衛星の軌道面と太陽のなす角を常に一定にしています。 図6 太陽とSSOの軌道面変化の関係 回帰軌道・準回帰軌道回帰軌道とは地球の自転が1回進むたびに同じ地点を通過する軌道のことです。 図7 軌道と地球の自転の関係 例えば,図7のように地球の周りを人工衛星が周回しているとします。点Aの真上を人工衛星が通過します。人工衛星が1周して戻ってきたときには地球の自転により点A⇒点A’に移るとします。次の周回後には点A’⇒点A”にあり,X回周回したときに点Xにいるとします。そして次の周回には点X⇒点Aに重なるようにするのが回帰軌道となります。準回帰軌道は自転がN回進んだ時に同じ地点を通過する軌道です。Nは3~20が一般的です。 準回帰軌道と太陽同期軌道の組み合わせ地球観測衛星は太陽同期軌道(SSO)と準回帰軌道と組み合わせた軌道を選ぶことが多いです。この2つを組み合わせることで,N日に1回同じ方向の太陽光による観測を行うことができます。一般的な地球観測衛星は同じ地点を通過するときの地方時を午前10時か午後2時に設定しています。午前10時や午後2時を選ぶことで適度な照度で観測を行うことができます。(地方時:南中した地点の経度を12時としたときの各経度の時刻。15°で1時間ずれる。日常的に用いる標準時は各国・各地域で特定の経度での時刻を表すが,地方時は各経度で時刻が異なる。) 参考文献・宇宙ロケット工学入門,宮澤 政文[著],朝倉書店・人工衛星の軌道 概論,博士 (工学) 川瀬 成一郎 著,コロナ社
 ロケット工学
ロケット工学 
コメント